With their elementary design and functionality, robot claws are one of the most popular grippers among hobbyists. Known sometimes as robot claw grabbers, robot claws consist of two claws, or jaws, that grasp an object by coming together from opposite sides of an object. In its broadest sense, the term claw refers to any type of gripper that integrates fingers or jaws to grasp an item by closing around the object. These fingers can be hard or soft; however, soft grippers are common in food production and the handling of delicate objects. Because of their simple design, robot claws provide numerous uses in a variety of industries.
How are Robot Claws Used?
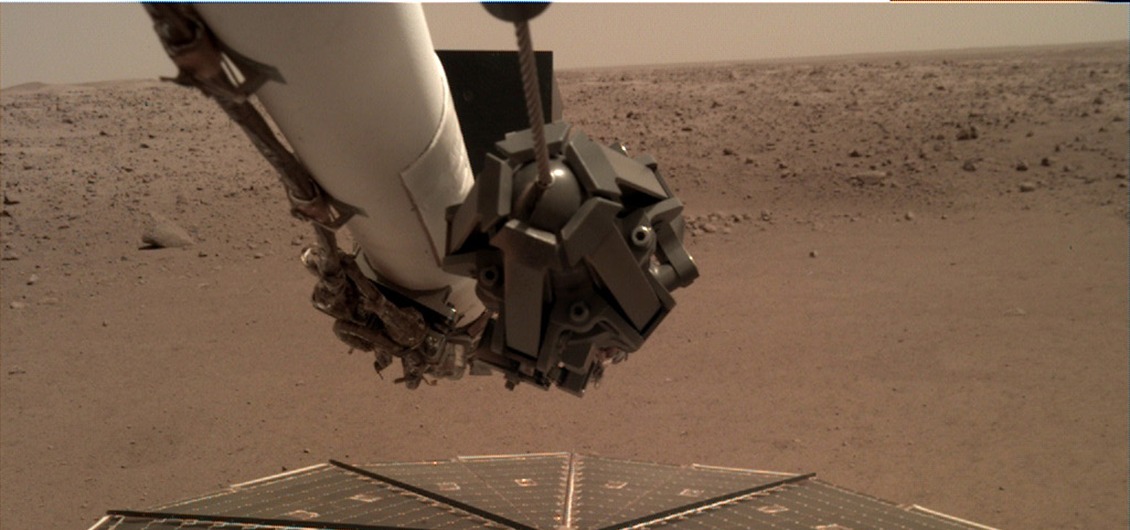
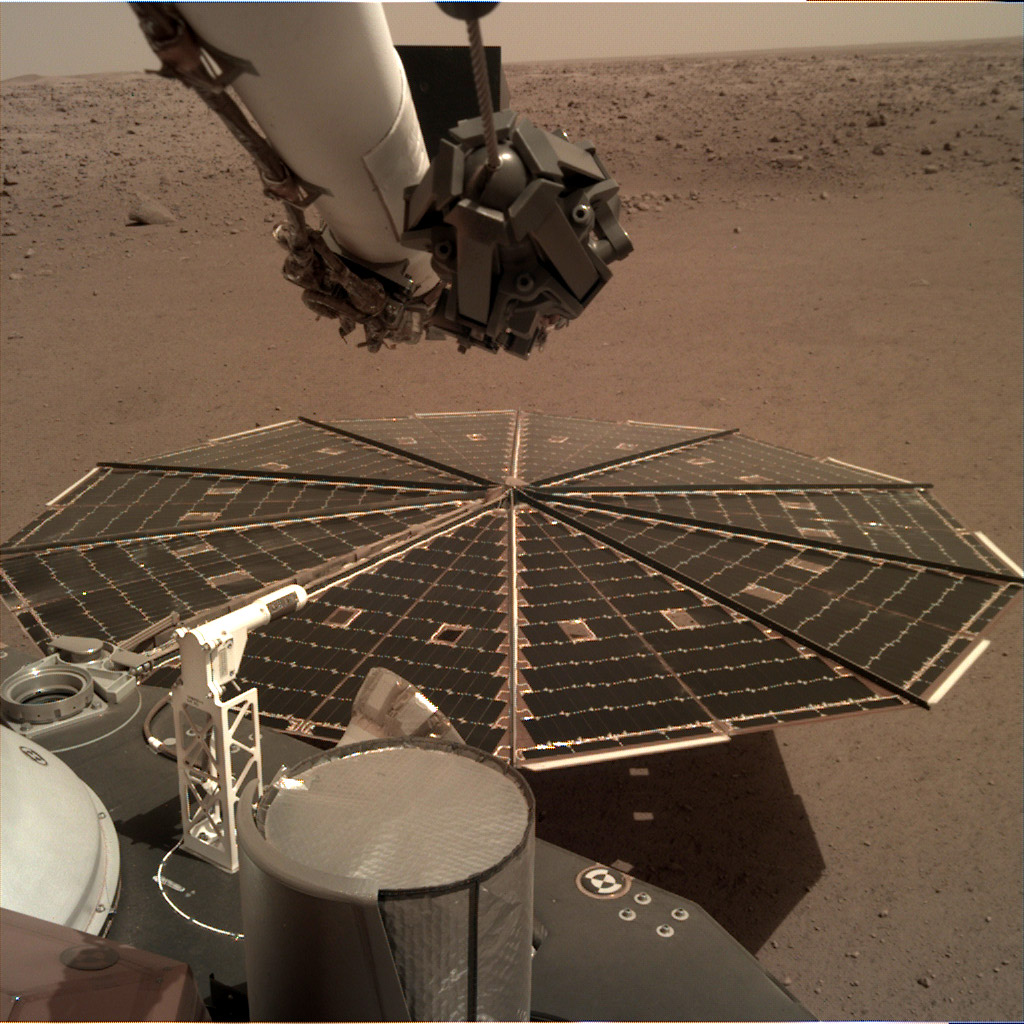
In manufacturing environments, robot claws are popular end effectors, performing applications for robot arms, including assembly, pick and place, and packaging and palletizing. In fact, marine researchers use robot claws to guide undersea research on jellyfish, while NASA’s InSight mission utilizes a robot claw arm to place instruments on the Martian surface.
Hydraulic vs. Mechanical
Often used for gripping or clamping items in manufacturing environments, mechanical claws are inspired by the 2- and 3-finger grippers popular amongst those who use collaborative robots. There are two common types of claws and clamps: mechanical and hydraulic. Best suited for high volume applications, hydraulic clamping or gripping systems are ideal for situations when critical tolerances must be maintained. With the help of electric pumps and digital pressure switches, hydraulic claws supply approximately 1 percent accuracy in clamping force.
For small production batches and situations where wide tolerances are acceptable, mechanical clamping and claw systems are suitable. Because mechanical systems are typically adjusted manually using a wrench, they provide approximately 10 percent accuracy in clamping force. Though cheaper than their hydraulic equivalents, mechanical claws and clamps are more time-consuming to operate. Additionally, hydraulic systems are not safe for high-temperature operations, making mechanical claws the secure choice in those types of applications.
How Do Mechanical Claws Work?
There are a variety of ways mechanical claws close their pincers. For instance, when a piston in the middle of a design is lifted, the pincers close. In other designs, the pincers are brought together using an electromagnet. No matter the design, the fundamentals are always the same: the gripper uses jaws to grasp an object.
From soft grippers to 2- and 3-finger grippers, collaborative robots use many claw-like end effectors. Far beyond the capabilities of their mechanical counterparts, these robot claws offer levels of intelligence and autonomy. A robot claw, for instance, provides useful feedback to a cobot and PLC. This information is then used to refine manufacturing processes. Cobot grippers are smaller while offering precision over mechanical claws.
Parallel grippers, also known as 2-finger or 2-jaw grippers, achieve a grip when two pincers close parallel to the workpiece. With this simple design, engineers have fabricated a wide range of versatile gripper technologies for manufacturing applications, including material handling and assembly with packaging and palletizing. There are three types of parallel grippers: electrical, pneumatic, or hydraulic. However, parallel grippers are limited in their versatility since they can only execute a pinch-type grasp. Adaptive grippers, though, provide additional functionality since they can adjust themselves to different product shapes without the need to be programmed every time.
Why choose PFA for your Automation Solutions?
If your robot tooling needs to be able to pick up, manipulate, and place products, then you are going to need a robotic gripper. PFA offers some of the highest force-to-weight ratio grippers to make your application a success. With so many types, sizes, and configurations on the market, it can be daunting when selecting the optimum gripper for your robot tool. Let us help you get a grip on your automation system by contacting us today or calling 262-250-4410.
Photo taken from mars.nasa.gov
{kind=link}